Клебанов Д. А., зав. лабораторией интеллектуальных методов мониторинга ГТС ИПКОН РАН
Жабин Д. В., научный сотрудник ИПКОН РАН
Поплавский С. Ф., директор направления «Горное дело и металлургия», фонд «Сколково»
В статье описаны проблемы, связанные с влиянием плохой видимости и человеческого фактора на аварийность карьерного транспорта. На основе мирового опыта описаны варианты решений и выбор оптимальной структуры системы предотвращения столкновений карьерной техники. Определена архитектура, интерфейсы интеграции с другими информационными системами и вызовы при внедрении подобных систем, заключающиеся в организации процесса фиксации действий водителей карьерных самосвалов. Описан процесс создания новых инновационных решений и трансферт технологий из гражданского транспорта в карьерный как пример успешной кооперации ФГУП «НАМИ» и технологической компании. Оценены возможные перспективы поэтапного создания высокоавтоматизированного карьерного транспорта. Сформулированы преимущества для горнодобывающей отрасли поэтапного внедрения технологий создания высокоавтоматизированного карьерного транспорта.
Ключевые слова: система предотвращения столкновений, система помощи вождению, ADAS, роботизированный транспорт, высокоточная навигация, промышленная безопасность, автотранспорт, CAS.
Современная горнодобывающая промышленность, играющая значительную стратегическую роль в развитии национальной экономики, сталкивается с множеством проблем, связанных с необходимостью разработки и внедрения новых решений по обеспечению безопасной и эффективной добычи твердых полезных ископаемых. Совершенствование организации и управления технологическими процессами играет решающую роль в повышении эффективности открытых горных работ. Одним из основных инструментов эффективной горной добычи являются современные автоматизированные системы управления горнотранспортными комплексами (АСУ ГТК), направленные на мониторинг основных технологических операций работы транспорта и техники. Первоначально факторы, влияющие на внедрение АСУ ГТК, связаны с минимизацией технологических простоев, повышением среднетехнической скорости движения карьерной техники, оптимизацией грузопотоков. Но за последние несколько лет, помимо первостепенных целей АСУ ГТК, появились задачи, связанные с промышленной безопасностью. При активном участии регулирующих органов и появлении пункта 559 приказа Ростехнадзора от 10 ноября 2020 г. № 436, определяющего состав систем, включенных в Многофункциональную Систему Безопасности для открытых горных работ (которые могут быть частично закрыты современными АСУ ГТК), все больше горнодобывающих предприятий стали серьезно оценивать риски, связанные с инцидентами карьерного транспорта, в том числе и возможные столкновения и аварии. В данном пункте приказа односложно определено, что на открытых горных работах должен быть осуществлен контроль работы основного горнотранспортного оборудования и других систем (подсистем) безопасности с учетом специфики угольного разреза. Если же вдаваться в детали и оценить, какие причины аварий возможны, то можно выделить следующие:
• маневрирование транспорта в слепых зонах;
• снижение видимости из-за туманов, задымленности в зоне ведения горных работ;
• большое скопление техники на участке технологической дороги;
• усталость водителя и повышенная невнимательность к дорожной обстановке;
• наличие внешнего или нетехнологического транспорта в зоне ведения горных работ.
Все вышеперечисленные причины могут способствовать повышенной аварийности карьерной техники.
Тренды в системах предотвращения столкновения высокоавтоматизированных транспортных средств
Для описания возможных вариантов снижения рисков и повышения эффективности работы карьерного транспорта рассмотрим лучшие мировые практики и стандарты противодействия столкновений и повышения промышленной безопасности карьерного транспорта. Следующие организации определяют тренды в области противодействия столкновений и создания высокоавтоматизированных транспортных средств на открытых горных работах:
• EMESRT (Earth Moving Equipment Safety Round Table),
• ICMM (International Council on Mining and Metals),
• Proximity Detection System Validation Framework (ACARP C26028 PDS testing methodology validation framework project),
• Global Mining Guidance Group.
Кратко опишем историю вопроса и позицию вышеназванных организаций, которые уже более 10 лет назад фактически сформировали тренды к созданию систем противодействия столкновений и дальнейшего их развития до высокоавтоматизированного карьерного транспорта, в том числе и автономного.

С 2013 года EMESRT активно участвует в глобальной инициативе по улучшению работы горного транспорта и техники. Организация включает крупные горнодобывающие компании, ключевых OEM-производителей техники, промышленные ассоциации. С точки зрения безопасности и создания систем противодействия столкновений видение EMESRT однозначно формулирует позицию, что глобальная горнодобывающая промышленность должна быть без смертельных случаев, травм и профессиональных заболеваний, связанных с работой горной техники и транспорта.
В 2018 году при поддержке EMESRT ICMM запустил программу инноваций. Программа «Чистые и безопасные транспортные средства». Определено, что самой высокой категорией смертности среди горнодобывающих компаний – членов ICMM являются аварии с карьерным транспортом, связанные с отказами средств управления при ведении горных работ. По этой причине данная программа направлена на продвижение технологий автоматизации взаимодействия транспортных средств. Программа «Чистые и безопасные транспортные средства» положила начало сотрудничеству между горнодобывающими компаниями и промышленностью, OEM-производителями техники и поставщиками технологий в области развития высокоавтоматизированного транспорта.
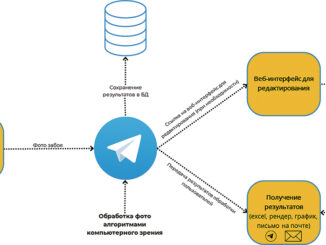
EMESRT разработал 9-уровневую модель взаимодействия транспортных средств (рис. 1) в качестве основы для развития технологий автоматизированного взаимодействия и контроля карьерной техники. Концепция подразумевает описание принципов взаимодействия и их типов между карьерной техникой, техникой и персоналом, техникой и окружающей средой.
К ключевым факторам, влияющим на эффективность, безопасность взаимодействия и управления горной техникой и карьерным транспортом, относятся:
• динамическая взаимозависимость между уровнями управления;
• категории контроля, которые действуют в разных временных рамках;
• высокая зависимость от принятия решений, связанных с человеческим фактором, в режиме реального времени.
EMESRT заявляет, что для эффективного внедрения уровней 8–9 (советчики управления транспортным средством и уровень вмешательства или автоматизированного управления транспортным средством) в модели взаимодействия нужно и необходимо понять эффективность и применимость уровней 1–7 для конкретного горнодобывающего предприятия. Уровни 1–7: требования предприятия — уровень 1, где проектируются горные работы; уровень 2: управление инфраструктурой, где описываются требования к транспортной берме, технологическим дорогам и сменам; уровень 3: требования к ремонтам, правилам движения на горных работах; уровень 4: полномочия действовать, где описываются требования к доступу на предприятие; уровень 5: описывает требования к здоровью и проверке персонала; уровень 6: операционное соответствие техники, где определены требования к чек-листам, состоянию техники, предсменным осмотрам; уровень 7: описывает работу машинистов и водителей горной техники средствами визуального контроля при ведении горных работ.
EMESRT также разработал методику, которую назвал «система контроля взаимодействия горной техники и транспорта», для определения эффективности контроля и поддержания процессов безопасного и эффективного горного производства.
Следующие ключевые шаги были включены в ее состав:
Шаг 1. Понять «проблему», а не просто симптомы.
• Насколько эффективны нынешние меры контроля?
• Есть ли какие-либо отказы (может ли что-то пойти не так)?
• Устраняет ли система управления эти виды отказов?
Шаг 2. Использовать виды отказов для определения вариантов решения проблемы, связанной с безопасностью взаимной работы горной техники. На этом шаге также определяется, как и какие технологии могут помочь.
Если сформулировать кратко, то уровни 1–7 EMESRT описывают процессы, которые помогают улучшить то, что мы делаем сейчас, а уровни 8–9 определяют технологии, которые заменяют то, что мы делаем сейчас, с точки зрения управления карьерным транспортом.
Важно, чтобы на горных работах особое внимание уделялось улучшениям и усилению базового контроля и процессов (уровни 1–7 EMESRT). Это считается лучшей практикой горного производства. Когда на горных работах не уделяют особого внимания улучшению своего базового уровня контроля 1–7, технологии и автоматизированные системы противодействия столкновений могут не дать результатов. Решения, которые обеспечивают взаимодействие карьерного транспорта с людьми, карьерного транспорта между собой, не функционируют как самостоятельные в отрыве от других базовых процессов производства. При внедрении систем противодействия столкновений важно, чтобы горнодобывающее предприятие полностью организовало бизнес-процесс использования данных систем. Маркетинговые материалы не описывают технологические процессы и не могут послужить базой для организации бизнес-процессов на предприятии.
Для организации процесса снижения аварийности карьерного транспорта рассмотрим процесс управления транспортом в виде последовательных задач, которые необходимо осуществить водителям и автодиспетчерам при ведении горных работ.
Первая ключевая задача данного процесса — предупредить аварию за счет своевременного уведомления водителей самосвалов и машинистов горной техники. Важно рассмотреть сценарии взаимодействия техники, которые должны быть описаны при внедрении системы противодействия столкновений.
Вторая задача — проанализировать стили движения каждой транспортной единицы, собрать показатели работы карьерных самосвалов и выявить нарушения, связанные с регламентами работы.
Третья задача в данном процессе — отслеживать эффективность предпринятых мер промышленной безопасности и скорректировать планы по организации безопасной работы и движения карьерной техники.
Критерии эффективности систем противодействия столкновений в соответствии с уровнями 7–9 EMESRT:
Уровень 7. Осведомленность
• Способность обеспечить повышенную осведомленность о ситуации для водителей и машинистов техники.
• Предупреждает водителя и машиниста о потенциальной нештатной ситуации.
• Предоставляет оператору контекст ситуации.
На этом уровне система должна отвечать на вопросы: где это? Что это такое? Как далеко это? Что это за объект? Как быстро объект передвигается и приближается? Системы этого уровня визуально оповещают операторов горной техники.
Уровень 8. Советчик
• Определяет непосредственную угрозу столкновения.
• Предоставляет специальные голосовые инструкции для водителей самосвалов с целью вмешаться в движение.
• Водитель или машинист горной техники оценивает голосовые и визуальные инструкции в сочетании с другими факторами и затем вмешивается в управление техникой.
Уровень 9. Автоматизированное управление транспортным средством (автоматизированное управление)
• Предоставляет технике специальную инструкцию по контролю и управлению транспортным средством (торможение, ускорение) в автоматизированном режиме.
• Техника оценивает инструкцию в соответствии со сценариями взаимодействия техники, а затем вмешивается в управление (действие по торможению или ускорению техники в автоматизированном режиме).
• Система параллельно передает контроль над автоматизированным управлением водителю или машинисту техники для принятия дополнительных действий.
• Передает ручное управление водителю и машинисту техники после совершения сценария автоматического управления техникой.
Существуют различные классы систем противодействия столкновений и автоматизации взаимной их работы, которые как раз разделены по уровням автоматизации влияния на транспортные средства:
PAT (Proximity Awareness Technology) — системы оповещения о приближении к транспортным средствам. К таким технологиям относятся системы пассивной безопасности, такие как системы кругового обзора, сигналы при движении задним ходом и т. д.
PDT (Proximity Detection Technology) — системы детекции приближения к транспортным средствам или персоналу. Это технологии, которые определяют расстояние между объектами и транспортными средствами, данные системы не принимают никаких решений. К таким технологиям относятся парктроники, радары, лидары, решения, определяющие расстояния.
CAT (Collision Avoidance Technology) и построенные на них CAS (Collision Avoidance System) — системы активного анализа транспортной обстановки и взаимодействия техники и персонала, которые могут останавливать транспортные средства и выдают рекомендации водителям и машинистам горной техники.
Варианты технологий, которые используются в системах помощи при вождении на горных работах
Теперь рассмотрим варианты технологий, которые используются для предупреждения столк-новений техники на горных работах, и технические решения, которые могут существенно снизить аварийность технологического транспорта. Разные технологии имеют свои преимущества и недостатки, и при внедрении систем класса CAS (противодействие столкновений) нужно учитывать уровни 1–7 EMESRT и применимость технологий.
Семь наиболее распространенных технологий / систем для построения систем предупреждения столкновений (PDS/CAS):
1. Радиочастотный (RF) метод идентификации объектов.
2. V2X.
3. UWB.
4. ГНСС (GPS, Глонасс и т. д.).
5. Радарные и ультразвуковые системы.
6. Цифровые камеры.
7. Лидарные методы детекции техники.
Программа управления изменениями и внедрением системы противодействия столкновений
Горнодобывающие предприятия должны интегрировать системы противодействия столкновений с существующими системами автоматизации на горных работах, включая системы диагностики, а также такие процессы, как планирование сменных заданий, диспетчеризация горного транспорта. Ниже представлен список ключевых рекомендаций при проектировании и планировании процесса внедрения системы противодействия столкновений.
• Согласование архитектуры и процессов работы системы с ключевыми заинтересованными сторонами до / во время / после внедрения технологического решения PDS/CAS.
• Обучение водителей и машинистов горной техники (пользовательский интерфейс, предпусковые проверки системы).
• Проведение инструктажей на предприятии, включая линейный персонал, диспетчеров, сервисные службы.
• Интеграция системы противодействия столкновений с отчетностью по ОТиПБ.
• Интеграция системы в существующие процедуры на горных работах, включая разработку новых регламентов (например, процедуры эксплуатации / технического обслуживания техники и элементов системы противодействия столкновений).
• Определение требований к КТГ транспортных средств при использовании системы противодействия столкновений.
• Определение минимального количества запасных частей системы противодействия столкновений на складе.
• Определение, как происходит управление изменениями в конфигурации системы (при необходимости), например, изменения скорости, расстояния и направления движений в системе и т. д.
• Определение ключевых показателей эффективности при работе системы противодействия столкновений (количество срабатываний, типы нарушений при работе водителей с системой и т. д.).
Проблемы, возникающие при переходе от уровня 7 и 8 EMESRT до уровня 9 (контроль автоматизированного вмешательства в управление техникой)
Некоторые из проблем на пути к автоматизации процессов контроля техникой, включая автоматизированное торможение или поддержание скорости движения, связаны с законодательной базой, технической готовностью карьерного транспорта и существенно более сложным процессом внедрения. В частности, управление тормозом или газом невозможно без тесной коллаборации с заводом — производителем техники, поэтому сторонние вендоры в отрыве от заводов — производителей техники практически не разрабатывают и не внедряют такой класс решений. В мире только в Южной Африке реализован этот уровень автоматизации при внедрении систем противодействия столкновений, так как на законодательном уровне данный мандат был выдан в 2022 году. Также существуют проблемы в юридической плоскости внедрения технологий уровня 9 EMESRT, когда с использованием системы противодействия столкновений требуется многостороннее соглашение между горнодобывающим предприятием, OEM-производителем горной техники, технологическим провайдером систем PDS/CAS. Водитель или машинист горной техники, несмотря на наличие системы противодействия столкновений, по-прежнему является ответственным за безопасность техники (в соответствии с ISO 21815-2).
Сосуществование CAS, адаптивного круиз-контроля и автономных/роботизированных систем грузоперевозки
Роботизированные системы грузоперевозок развиваются во всем мире, и одним из элементов данных систем являются современные системы противодействия столкновений техники. С точки зрения технологий и готовности горнодобывающих предприятий, безусловно, первым шагом в роботизации является внедрение решений класса CAS, так как реализация и апробация всех сценариев взаимодействия техники и людей являются первостепенными с точки зрения безопасности горного производства.
Когда роботизированная горная техника покидает зону автономной работы и переключается на пилотируемые операции (например, для заезда в зону технического обслуживания), в настоящее время техника должна быть оснащена автономным PDS/CAS. Принятие существующего стандарта совместимости и поэтапного перехода к роботизированным технологиям с использованием стандарта V2X как раз допускает развитие CAS до технологий роботизации. Так как вмешиваться в автоматизированном режиме в управление транспортных средств могут производители техники, то большинство систем, которые представлены на рынке, соответствующих уровню 9 EMERST, производятся производителями карьерной техники. Также ряд технологических компаний, производящих системы, которые соответствуют уровню 8 EMERST, представлены ниже.
1. Caterpillar
Cat MineStar Collision Avoidance System: включает в себя различные технологии, такие как радары, GPS, и системы видеомониторинга, чтобы обеспечить безопасность и эффективность в работе на горных объектах.
2. Komatsu
Komtrax Plus Collision Avoidance System: использует GPS и радиочастотные идентификаторы для отслеживания и контроля положения машин на горном участке, предотвращая столкновения и опасные ситуации.
3. Hitachi Construction Machinery
Hitachi Global e-Service Collision Avoidance System: включает в себя GPS, системы обнаружения движущихся объектов и видеокамеры для обеспечения безопасности и координации движения техники на открытых горных работах.
4. Hexagon Mining
HxGN MineProtect Collision Avoidance System: использует GPS и радио для отслеживания положения и обмена данными между транспортными средствами, а также предупреждает о возможных столкновениях.
5. PSI Mining
PSI CAS PRO. Система использует V2X технологии и ГНСС для отслеживания траекторий движения техники. Данная система активно развивается и интегрируется с системами диспетчеризации и адаптивным круиз-контролем.
6. RealTrack
Антинаезд: система разработана на технологиях UWB, позволяющих отслеживать технику и персонал на расстояниях до 100 метров.
7. Wabteck
CAS. Система основана на комплексировании технологий V2V, ГНСС и систем связи для анализа на сервере нахождения техники и персонала.
8. Trimble
Trimble Connected Mine Solutions: предоставляет интегрированные решения для мониторинга и управления, включая GPS, телематику и системы предотвращения столкновений.
9. RFID-технологии
Несколько производителей, таких как Zebra Technologies, Honeywell и другие, предлагают RFID-системы для идентификации и отслеживания транспортных средств и оборудования в горной промышленности.

Большинство производителей систем противодействия столкновений предлагают разнообразные технологические решения, которые могут варьироваться от систем, использующих GPS и радиочастотные идентификаторы, до более сложных интегрированных платформ, которые компенсируют различные технологии, объединяющих множество сенсоров и систем мониторинга. Выбор конкретной системы часто зависит от специфики горнодобывающего предприятия, его потребностей в обеспечении безопасной работы горной техники и существующей технологической инфраструктуры.
Отечественная система предотвращения столкновений
В связи с тем, что большинство зарубежных производителей карьерной техники, а также технологические компании ушли из России, а горнодобывающая отрасль по-прежнему требует безопасного и эффективного решения вопросов грузоперевозки и работы технологического оборудования, встал вопрос о создании отечественной системы противодействия столкновений, которая соответствовала бы мировым трендам в области создания таких систем, учитывала существующие стандарты и рекомендации и могла бы быть быстро тиражирована на всю отрасль. В итоге решение нашлось благодаря кооперации Федерального научного центра ФГУП «НАМИ», занимающегося развитием технологий для автомобилестроения, и технологической компанией, которая разрабатывает и внедряет решения в горнодобывающей отрасли. На основе существующих наработок ФГУП «НАМИ», а также технологической экспертизы специалистов резидента «Сколково» были сформулированы требования к системе, ее технологическому стеку и архитектуре решения. В итоге была разработана система противодействия столкновений, относящаяся к классу PDS/CAS. Основой предлагаемого решения стало применение V2X-технологий стандарта ETSI ITS-G5 или 3GPP C-V2X в области обеспечения безопасности движения. Данная технология была выбрана, так как она позволяет ее развивать до системы адаптивного круиз-контроля и роботизированного управления технологическим транспортом.
Системы взаимодействия транспортных средств на основе V2X наряду с системами, основанными на других технологиях, будут использоваться для получения критически важной информации об окружающей обстановке. Информация, получаемая по каналам V2X в формате CAM-сообщений (стандарт ETSI EN 302 637-2 Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service) и DENM-сообщений (ETSI EN 302 637-3 Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications, значительно повышает безопасность в ряде ситуаций, когда технологический транспорт появляется в прямой видимости за очень короткое время перед столкновением и в обычных условиях столкновение предотвратить уже невозможно. Предлагаемая технология базируется на применении на всех единицах транспорта и спецтехники, находящейся на территории объекта, устройств V2X, использующих стандарт связи DSRC (англ. — Dedicated Short Radio Communication, сокр. — DSRC) — семейство стандартов IEEE 802.11p/WAVE, ETSI ITS-G5.
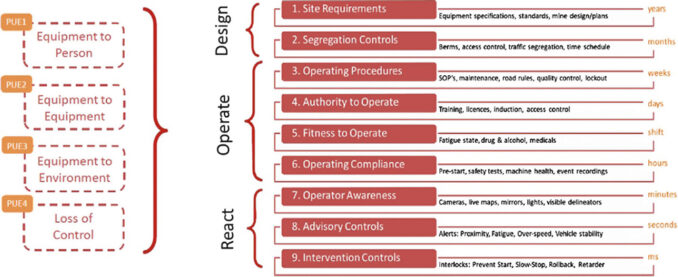
Архитектура системы противодействия столкновений представлена на рисунке 2.
Бортовые устройства непрерывно, с частотой до 10 Гц, передают в эфир сообщения о местонахождении и скорости ТС, направлении движения, торможении и другую информацию, получая взамен аналогичную от других участников движения. На основе получаемых данных бортовой компьютер выполняет моделирование и прогнозирование развития дорожной ситуации и в случае выявления потенциальной возможности столкновения заблаговременно сообщает об этом водителю. Важно отметить, что данная система интегрирована в единый дисплей взаимодействия водителя с другим технологическим транспортом и процессами так называемой системой диспетчеризации горно-транспортного комплекса. На основе комплексного анализа данных V2X-система будет выдавать рекомендации водителям и машинистам горной техники в части обеспечения безопасного передвижения, основанные на сервисах обеспечения безопасности движения и рекомендациях сценариев EMESRT.

Перечень базовых сервисов, реализуемых системой предотвращения столкновений, разработанной резидентом «Сколково»:
1) Предупреждение о приближении транспортных средств с правом приоритетного проезда (спецтранспорта).
2) Предупреждение о медленном транспортном средстве.
3) Предупреждение о приближении к стоящему (неисправному) транспортному средству.
4) Предупреждение о торможения впереди идущего транспортного средства.
5) Предупреждение об опасном сближении.
6) Предупреждение о превышении максимальной разрешенной скорости.
7) Предупреждение о наличии нескольких транспортных средств в зоне маневрирования.
8) Предупреждение о наличии человека или транспорта общего назначения в зоне движения.
В завершение важно отметить ключевые преимущества системы, разработанной совместно ФГУП «НАМИ» и резидентом «Сколково», а также научно-технический задел, который дает данная система при создании и развитии высокоавтоматизированного карьерного транспорта:
1. Технологии обеспечения безопасности движения на основе V2X-стандарта ETSI ITS-G5 используются при создании роботизированных систем грузоперевозок крупнейших производителей роботизированных систем, таких как Caterpillar, Komatsu и др.
2. Совместимость системы противодействия столкновений на основе V2X с системами диспетчеризации и мониторинга транспорта различных производителей позволяет ее внедрять практически на любых горнодобывающих предприятиях России.
3. Простота внедрения и эксплуатации системы противодействия столкновений позволяет ее внедрять без необходимости тонкой настройки на предприятии. При внедрении и дальнейшей эксплуатации системы пользователям не потребуется выполнять настройки, калибровки и обслуживание элементов системы. Проведенные на этапе пусконаладки настройки и калибровки не потребуется менять.
4. В связи с тесной кооперацией ФГУП «НАМИ» и производителей техники возможно развитие технологии до уровня EMESRT-9 и создания высокоавтоматизированных транспортных средств с автоматизированным управлением газом и тормозом и постепенным переходом к роботизированным системам грузоперевозки.
Применение систем противодействия столкновений является трендом развития технологий на открытых горных работах. При наличии пункта 559 приказа Ростехнадзора от 10 ноября 2020 г. № 436 МФСБ должна предусматривать применение систем противодействия столкновений для существенного снижения геотехнологических рисков и вероятности травмирования персонала на горных работах. В связи с отсутствием законодательной практики применения таких систем в России возможно на базе научных институтов ИПКОН РАН и/или ГоИ КНЦ РАН и/или Санкт- Петербургского горного университета, а также ФГУП «НАМИ» рассмотреть возможность создания инструктивных материалов и стандартов применения подобных систем с возможностью их развития до роботизированных систем грузоперевозок на открытых горных работах при тесной кооперации с производителями техники БЕЛАЗ, КАМАЗ, ОМЗ, а также поставляемыми в Россию китайскими производителями техники.
Список литературы
1. https://emesrt.org/wp-content/uploads/2023/11/EMESRT-PR-5A-Vehicle-Interactions_v2_20190902.pdf
2. Australian Coal Research Limited 2024, PDS Validation Framework, Mining3, accessed 20 May 2024, https://www.acarp.com.au/abstracts.aspx?repId=C26028
3. Mining3 PDS Toolkit
4. NSW Govt MDG-2007 (Feb 2014) Guideline for the selection and implementation of collision management systems for mining https://www.resourcesregulator.nsw.gov.au/sites/default/files/documents/mdg-2007-guideline-for-the-selection-and-implementation-of-collision-management-systems-for-mining-2014.pdf
5. White Paper and Guiding Principles Functional Safety for Earthmoving Machinery (CMEIG/EMESRT/ICMM, ver 0.5, 5/3/2020) https://www.cmeig.com.au/wp-content/uploads/CMEIG-EMESRT-ICMM-White-Paper-and-Guiding-Principles-for-Functional-Safety-on-Earthmoving-Machinery-Ver.-0.5-March-2020.pdf
6. Современные системы предотвращения столкновений горной техники и наездов на персонал при ведении открытых горных работ: https://mining-media.ru/ru/article/geoinformsys/16125-sovremennye-sistemy-predotvrashcheniya-stolknovenij-gornoj-tekhniki-i-naezdov-na-personal-pri-vedenii-otkrytykh-gornykh-rabot
7. Пути реализации систем управления режимами движения транспортного средства на основе развития технологии автономного движения. Дебелов В. В., Ендачев Д. В., Евграфов В. В., Бахмутов С. В. В сборнике: Безопасность колесных транспортных средств в условиях эксплуатации. Материалы 99-й Международной научно-технической конференции. Иркутский национальный исследовательский технический университет; под общей редакцией А. И. Федотова. 2017. С. 504–512.
8. Перспективы разработки наземных беспилотных грузовых транспортных средств. Бахмутов С. В., Сайкин А. М., Ендачев Д. В., Евграфов В. В., Шагурин А. Л., Куликов И. А., Федосеев К. А. В сборнике: Интеллектуальные транспортные системы. Сборник трудов Международного автомобильного научного форума МАНФ-2017. 2017. С. 61–73.
9. Основы критериев оценки беспилотных транспортных средств. Сайкин А. М., Ендачев Д. В., Евграфов В. В., Шагурин А. Л., Маслов К. В., Новожилов А. А. Труды НАМИ. 2017. № 2 (269). С. 48–54.